
فهرست مطالب
بیوروباتیک: تا به حال درباره تغییرات زندگی بشر در طول تاریخ اندیشیده اید؟ فارغ از انقراض ها و تحولات محیطی که حیات وی را مدام تحت تاثیر قرار داده است، تولدی از جنس علم ،میتواند مهم ترین رویداد تقویم انسان ها باشد.
ربات ها،ماشین هایی با دقت عمل بالا و قابلیت برنامه ریزی مجدد که با اهداف گوناگونی طراحی و ساخته میشوند. جالب است بدانید که ربات ها،لزوماً حرکاتی شبیه انسان ندارند.اما توان انجام چند کار به صورت همزمان، توانایی تصمیم گیری و کنترل فعالیت های پیشبینی شده را دارند.
الگو قرار گرفتن طبیعت برای انسان به منظور رفع نیاز هایش،موضوعی تأمل برانگیز و غیرقابل انکار است. بطوری که امروزه با الگوبرداری از طبیعت بر پایه تقلید از مدل های طبیعی،سیستم های مدرن و پیشرفته ای طراحی می شود. رباتیک نیز از این قاعده مستثنا نبوده و طراحی ربات هایی با الگوبرداری از حیوانات ،جهت انجام پژوهش ها و فعالیت های امدادی،مهر تأییدی بر این مسئله است.
اما به راستی تلاش انسان برای دستیابی به زندگی بهتر،تا چه حد حیات سایر ساکنین کره زمین را تحدید میکند؟ پرسشی مهم و قابل تأمل که همواره دغدغه و خط قرمز دانشمندان و حامیان محیط زیست بوده است.
حاصل نگرانی های زیست محیطی و چاره اندیشی های رباتیک،تولد علمی نوین تحت عنوان “بیورباتیک” بود که با طراحی و ساخت ربات های حیوانی و جایگزینی آنها با حیوانات واقعی در آزمایشات،به پژوهشگران فرصت گسترش تحقیقات و برای حامیان حیوانات و اکوسیستم،آسودگی خاطر را به ارمغان آورده است.
حیواناتی که با الهام از آن ها ربات ساخته شده است!
انتخاب طبیعی طی میلیون ها سال مسبب تکامل حیوانات به بهترین شکل ممکن بوده است و نتیجه آن ،تغییراتی است که سبب ارائه کامل ترین راه حل ها برای مشکلاتی چون جابجایی، پرواز و چابکی حرکت می باشد.
به همین دلیل،حیوانات به عنوان منبعی از الهام برای ساخت ربات به شمار می آیند. در ادامه با تعدادی از این ماشین های هوشمند،آشنا می شویم.
 ربات های خفاشی
ربات های خفاشی
هواپیما های بدون سرنشین (کوادکوپترها) پیشرفته ترین دستاورد فناوری تا به امروز به شمار می آیند. اما بنا به عقیده مهندسان،پروانه هایی که با سرعت بالا در این سازه ها به چرخش در می آیند، سبب شده اند تا قابلیت استفاده در مناطق مسکونی انسان را نداشته باشند. بنابراین،ساختمان بال خفاش را سرلوحه طراحی ساختار های جدید قرار دادند.
هرچند این امر،با مشکلاتی همراه بود.جالب است بدانید که در هر بار بال زدن خفاش،بیش از 40 مفصل، دخیل است. برای جلوگیری از حجیم شدن سازه نهایی،پژوهشگران ناچار به بهینه کرن تعداد مفاصل از 40 مفصل به 9 تا از آنها بودند. همچنین سنسور های موجود در این ربات،توانایی چرخیدن،شیرجه زدن و پرواز را به آن میدهد.
ربات سوسکی (RMAH) با الگو قراردادن سوسک ،طراحی شده و قابلیت حرکت بر سطح زمین و سطح آب را دارد.
ربات مار (Pleuroboot) و ربات زنبور (RoboBee) از دستاورد های دیگر این زمینه هستند.
راه رفتن غیر یکنواخت در حیوانات
برای برسی تعامل رباتیک و موجود زنده، ابتدا لازم است تا ساختار های عصبی آن به دقت مورد مطالعه قرار گیرد. نخاع،حاوی شبکه ای از سلول های عصبی است که تقریباً مستقل عمل کرده و امکان انجام حرکات ریتمیک مانند راه رفتن و صحبت کردن با تلفن همراه به طور همزمان را موجب میشود.
موحققان مؤسسه (Salk) موفق به شناسایی نورون هایی شده اند که کنترل بازده کلیدی این مدار حرکتی را بر عهده دارند. مدار حرکتی نخاع،شامل 6 نوع از سلول های عصبی یا نورون هایی است که ارتباط میان اعصاب مغز،اعصاب فعال کننده یا مهارکننده عضلات را برقرار میکنند.
به کمک علم کنترل حرکت که به بررسی نحوه انجام حرکات موجودات و عوامل مؤثر بر آن می پردازد، دانشمندان دسته ای از حرکات را که به دنبال عملکرد عضلات اسکلتی و به فرمان سیستم عصبی صورت گیرد، فعالیت های ارادی یا رفلکسی نامیدند.
جالب است بدانید که مطالعه حرکت در حیوانات،سبب کشف نوعی از سلول های عصبی که امکان حرکت را فراهم میکند،شده است. این دستاورد گام بزرگی در راستای درمان بیمارانی که دچار ناتوانی های حرکتی به دلیل آسیب های نخاعی هستند،به شمار می آید.
ادامه تحقیقات با تمرکز بر نحوه حرکت چهارپایان همراه بود
این دسته از موجودات،از چهار عضو خود(دو عضو قدامی و دو عضو خلفی)برای نقل مکان با الگوی جابجایی مرکز جرم بدن به بالا یا پایین،استفاده می کنند. نحوه حرکت در تمام گونه های این گروه،به طور تقریبی یکسان است. بدین صورت که از عقب سمت چپ بدن شروع و با قدامی همان سمت ادامه می یابد.
به گفته پژوهشگران،این روش راه رفتن،با ثبات زیادی همراه است و صرف نظر از کیفیت حرکت که سریع یا آهسته انجام شود،قرار گیری بدن روی زمین همزمان به کمک سه پا انجام شده و سبب تشکیل نوعی مثلث میشود.
جالب است بدانید که بدن آنها را میتوان به سه صفحه تقسیم کرد:
- ساژیتال: تمایز دو طرف چپ یا راست
- عرضی: تمایز خلقی و قدامی
- پیشانی: تفکیک دو نیمکره شکمی و پشتی
بنابراین هرچه مرکز ثقل به مرکزثقل مثلث نزدیک ترباشد،ثبات ایستایی نیز،بیشتر خواهد بود.
 ساخت ربات هایی چهارپا با عملکرد بازتولید کنترل حیوانات!
ساخت ربات هایی چهارپا با عملکرد بازتولید کنترل حیوانات!
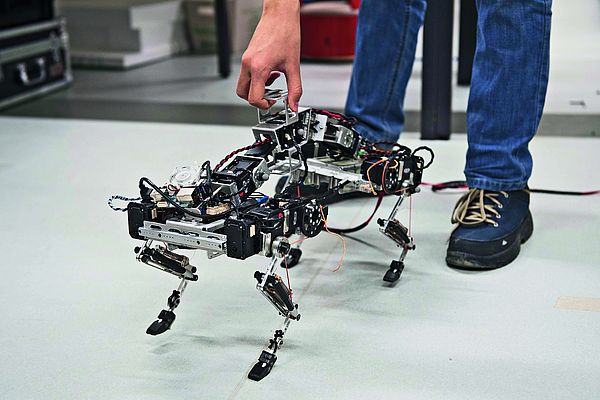
نتایج تحقیقات،مشاهدات و بررسی ها حول حرکت در چهارپایان،منجر به ساخت رباتی تحت عنوان SpotMini شد. این ماشین هوشمند چهارپا،دارای یک بازوی مفصلی است که به دستور شما،میتواند از اتاق نهارخوری شلوغ عبور کند،از پله ها بالا رود یا برایتان نوشینی بیاورد. سبک بودن آن سبب شده است تا قابلیت استفاده از بازو های خود جهت گذاشتن ظرف در ماشین ظرفشویی و بیرون آوردن آنها را نیز داشته باشد.
بنا به نظر سازندگان،نیازمندی به هدایت شدن این ربات ها به کمک یک کنترل توسط انسان،میتواند بر توانایی گسترده آنها در انجام کارها و وظایف،سایه بیاندازد. اما نکته قابل تأمل در عملکرد این سازه های استثنایی،چگونگی حفظ تعادل در آنهاست.
بنا به نحوه حرکت ،میتوان مکانیسم تعادلی را به دو صورت پویا و ایستا بیان کرد. تعادل ایستا هنگام حرکت با سرعت ثابت و یا توقف جاندار مشاهده می شود. این درحالیست که ایجاد تعادل پویا نسبت به تعادل ایستا به مراتب سخت تر است.چراکه این عمل باید هنگام حرکت با یک سرعت خاص،انجام شود. به طوری که گاهی ممکن است امکان ایجاد وقفه نیز،فراهم نباشد.
برخی اوقات ناپایداری ربات،نهایتا منجر به سقوط آن خواهد شد.فرایندی که با صرف زمان همراه است.حال،هوش مصنوعی،قادر است با استفاده از فرصت ایجاد شده و به کمک حرکت پاها،از افتادن ماشین جلوگیری کند. از این رو،این عمل را “کنترل افتادن” نیز، مینامند.
پایداری ربات ها در انواع فعال و غیرفعال نیز بررسی میشود
هنگامی که یک ربات به کمک پاهایش ایستاده باشد،دارای پایداری غیرفعال است.چراکه نیازی به کنترل و یا ایجاد تنظیمات خاص برای تثبیت این حالت ،نیست.
جالب است بدانید که تعادل غیرفعال را هنگام راه رفتن و با نگهداشتن سه پا بر روی زمین و سپس آوردن پای چهارم،که الگوریتم Creep gait نامیده می شود،نیز می توان ایجاد کرد.
تعادل فعال،هنگام حرکت با الگوریتم Trop gait دیده می شود. از حالت های مختلف راه رفتن م یتوان به حرکت چهاردست و پا (Creep)، یورتمه رفتن(Trop) و خزیدن (Crawl) اشاره کرد.
ویژگی عضلات حیوانات؛ بخصوص در گربه!
به منظور درک کامل تر فرایند حرکت،لازم است ابتدا به طور دقیق به بررسی بدن هنگام جابجایی پرداخته شود. چارچوبی از استخوان های مرتبط که وظیفه حفظ،نگهداری و شکل دهی به بدن و همچنین تسهیل و سرعت بخشی به حرکت را بر عهدا دارد،اسکلت نامیده میشود. مهرداران دارای اسکلت داخلی و اکثر بی مهرگان دارای اسکلت خارجی هستند.
جالب است بدانید تعداد کمی از جانورن مانند کرم خاکی هیچ کدام یک از گونه های اسکتی را ندارند. دستگاه ماهیچه ای متشکل از ماهیچه ها و عضلاتی است که با تبدیل انرژی شیمیایی مواد غذایی به انرزی مکانیکی و به دنبال آن ایجاد انقباضات و انبساط های پیاپی ،در بروز حرکت نقش دارند. درنتیجه میتوان گفت،همکاری دستگاه ماهیچه ای و استخوان بندی نهایتاً حرکت را سبب میشود.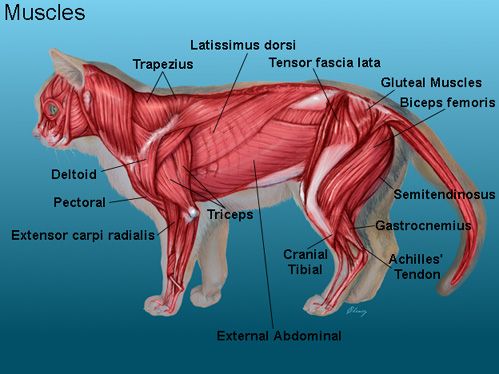
براساس شکل و اندازه ماهیچه ها میتوان آنهارا به سه نوع اسکلتی،صاف و قلبی تقسیم کرد:
- اسکلتی: دارای ظاهری مخطط که حدود 40درصد وزن فرد نرمال را تشکیل داده و در حرکات ارادی نقش دارد.
- صاف: با عملکرد خودکار در دیواره رگ و دستگاه گوارش وجود داشته و حدود 10 درصد وزن فرد نرمال را تشکیل می دهد.
- قلبی: ظاهری مخطط اما عملکرد غیر ارادی این نوع ماهیچه با حضور آن در ساختار قلب همراه است.
گربه ها صاحب یکی از پیچیده ترین دستگاه های ماهیچه ای میان جانوران هستند. حدود 495عضله به انعطاف پذیری این جاندار کمک میکند.
عضلات صاف در ایجاد هماهنگی ارگان های داخلی،عضلات کششی در اندام های قدامی ،عضلات سه سر و دلتوئید قدرتمند در شانه ها،32 ماهیچه منحصر به فرد در گوش خارجی به منظور چرخش ساختار شنوایی به دنبال تشخیص دقیق منبع صدا و عضلات خاص موجود در چشم ها با ایجاد امکان چرخش 180 درجه این عضو مهم،مهر تأییدی بر خلقت شگفت انگیز این موجود دوست داشتنی است.
رفلکس تحریک متقابل میان مفاصل ران و زانو
به دنبال بررسی انواع ماهیچه،اسکلت استخوانی و مطالعه نقش آها،باید به توضیح اصلی ترین بش این ساختمان حرکتی پرداخت. مفصل ها،محل اتصال یک استخوان به استخوان دیگر که براساس ساختار و عملکردشان ،سه دسته مفاصل غیر متحرک یا ثابت،نیمه متحرک و متحرک را تشکیل میدهند.
- مفصل ثابت
بدون حرکت بوده و یا حرکت هایی بسیار جزئی و قابل چشم پوشی دارند.مانند مفاصل جمجمه. جالب است بدانید که اکثر مفاصل بدن در این دسته بندی قرار میگیرند.
- مفصل نیمه متحرک
با قابلیت حرکتی محدود و نسبتاً کم،مانند مفاصل مهره ها
- مفصل متحرک
حرکت با محدودیت بسیار کم و در اکثر جهت ها،مانند مفصل ران که دومین مفصل بزرگ بدن است.
رتبه اول این لیست به مفصل زانو تعلق دارد که سبب اتصال ران به ساق پا میشود. با مقایسه کارکرد صحیح این ساختار ها نسبت به هنگام بروز اختلال در عملکرد مورد نظر،میتوان به اهمیت بالای سلامت آنها پی برد.
کودکن مبتلا به فلج مغزی به دلیل بروز اسپاسم های پیاپی و عدم تعادل عضلانی دچار وضعیت “کراوچ” می شوند. حالتی که بدن به دنبال اسپاسم عضلانی به فرمی مانند حرف “S” در می آید. به بیان دیگر در این وضعیت،بدن کودک از ناحیه کمر و زانو خمیده بوده و باسن به عقب رانده میشود.
FES یا تحریک الکتریکی عملکردی،درمانی موثر در توانبخشی بالینی به شمار می آید. از کاربرد های این روش میتوان به بازیابی عملکرد حرکتی پس از سکته مغزی اشاره کرد. در این شیوه درمانی،به کمک یک محرک الکتریکی ضعیف،به حرکت عضله در فرم صحیح آن،کمک میشود.
آزمایشات انجام شده بر یک پسر 18 ساله مبتلا به فلج مغزی حاکی از آن است که پیاده روی به کمک دستگاه FES ،افزایش میزان کشش زانو و ایستادن به کمک آن،افزایش حداکثری کشش را به دنبال دارد. گزارشات پزشکی بیانگر این است که اتصال FES به عضله چهارسر را،بسته به دامنه ی حرکت مصل ران و زانو،راه رتن خمیده را تا حد قابل توجهی اصلاح میکند. نتایجی که تا رسیدن به قطعیت ،مطالعات و آزمایشات زیادی را پیش رو دارند.
دستاوردهایی از ادغام رباتیک و زیست شناسی و ایجاد بیوروباتیک
مطالعات مشترک دو حوزه رباتیک و زیست شناسی،تحت عنوان علم بیورباتیک،مجر به ساخت پروتز های هوشمند شده است. شست سوم،حاصل فعالیت های محققان UCL،رباتی که مقابل انگشت شست و نزدیک انگشت کوچک قرار میگیرد. نکته جالب دراره این ماشین هوشمند،حسگر های فشاری است که به منظور کنترل،زیر انگشتان بزرگ پا متصل شده و ارتباط آن با دست ،بدون سیم اتفاق می افتد.
ارزیابی حرکات مختلف انگشت و ارائه پاسخ مناسب و با سرعت بالا به دنبال واکنش به تغییرات بسیار اندک فشار،رخ میدهد. طراحی و ساخت این ربات به منظور بررسی چگونگی تعامل اندام های رباتیک و مغز ، اجام شد.
بدین منظور آزمایشات گستره ای انجام و پس از مطالعات نتایج،رضایت و راحتی داوطلبان هنگام استفاده از این ماشین و احساس اینکه ربات،جزئی از بدن خود آنهاست،حاکی از موفقیت پژوهشگران میباشد. این دستاورد را می توان ارتقاع پیکر انسان تلقی کرد که در آینده نه چندان دور،سبب کارامد تر شدن نیروهای انسانی در مشاغل مختف میشود.
منابع
- https://www.sciencedaily.com/
- https://singularityhub.com/2017/11/28/9-robot-animals-built-from-natures-best-kept-secrets/
- https://www.digit.in/features/tech/robots-inspired-by-animals-44427.html
- https://www.digit.in/features/tech/robots-inspired-by-animals-44427.html
- http://iheartcats.com/
- http://online.boneandjoint.org.uk/doi/full/10.1007/s11832-0651-2
منابع تصاویر : pinterest / 3dnatives / therobotreport / ien
گردآورنگان:
آرین یزدانی
کیمیا شریفی
کوثر مرادی
حدیث کارگر
نگار تورانی
ویراستاران:
نگین آقازاده سلطانی
رضا ولی پور
همچنین بخوانید : نورپردازی عروسدریایی آتولا در پزشکی و صنایع رباتیک

یک نظر